标准学习 | 智能网联汽车运行安全测试项目和方法
2025-01-09 13:39:19

近日,《智能网联汽车运行安全测试项目和方法》(GB/T 44850-2024)发布,并将于今年5月1日正式实施。该项标准结合智能网联汽车现阶段技术现状,从标准化项目内容、规范化流程方法、科学化结果分析等三个维度,提出了适用于智能网联汽车运行安全测试的项目和方法,为规范开展智能网联汽车运行安全管理提供了技术支撑。

这项标准完善了《国家车联网产业标准体系建设指南(车辆智能管理)》相关运行安全测试标准体系,有助于促进我国智能网联汽车的高质量发展,促进智能网联汽车准入和上路通行试点等政策的有效落地。
同时,不断建设完善的标准体系也对智能网联相关专业的教学提出了更高要求,将国标融入教学,是产教深度融合的创新实践,能够弥合教学端与产业端之间的差距,有助于培养出更加符合市场需求的高素质技术技能人才。
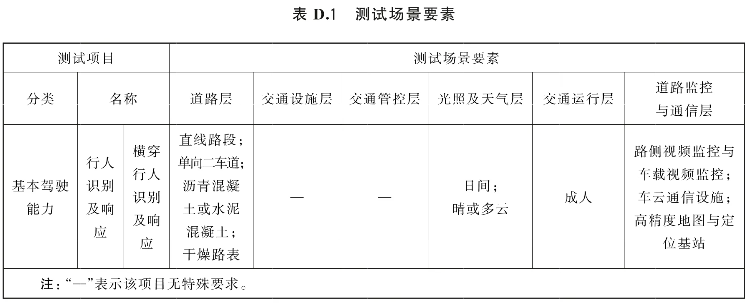
智能网联汽车运行安全测试项目主要包括基本驾驶能力、安全文明驾驶能力、应急避险驾驶能力等三类测试项目,每一类都有相应的测试项目和测试子项目。
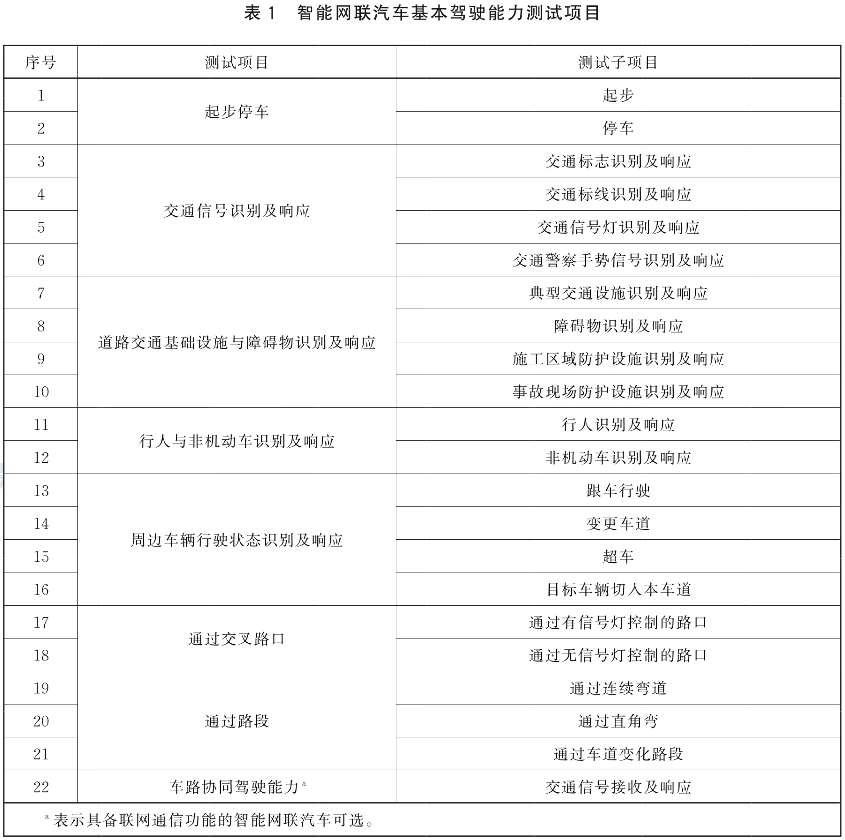
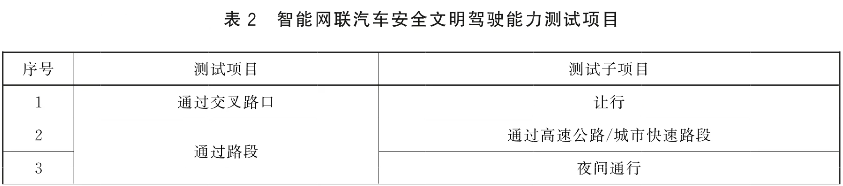
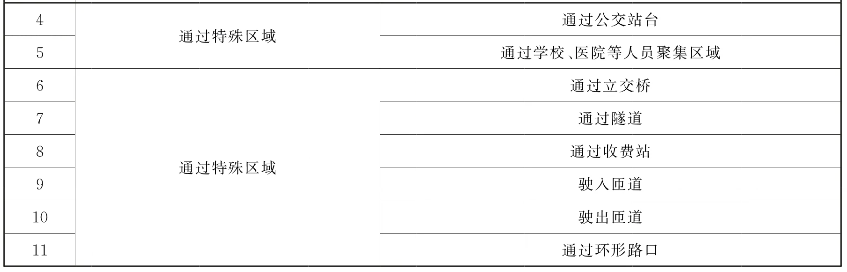
不同类型的测试项目有不同的测试方法,一般来说分为三种:封闭场地测试、公共道路测试、虚拟仿真测试。基本驾驶能力测试和应急避免驾驶能力测试宜采用封闭场地测试,应急避免驾驶能力测试也可采用虚拟仿真测试,而安全文明驾驶能力测试则采用公共道路测试。
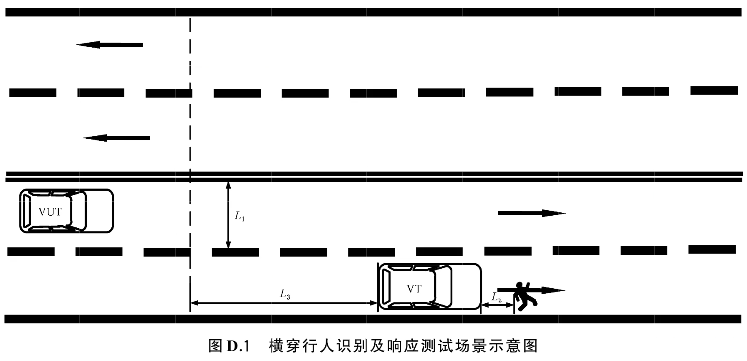
该标准详细列出了40多种测试方法,每种都包含完整测试的具体步骤,以行人与非机动车识别及相应测试方法中的横穿行人识别及响应测试项目为例:
基本驾驶能力测试宜采用封闭场地测试,在实际的教学实践中,院校出于成本、场地、资质等条件所限,很难或者无法提供符合要求的封闭场地、被测车辆、背景假人等教学条件,来让学生体验完整流程。
因此,虚拟仿真测试成为兼顾成本与教学效果的选择,通过虚拟仿真技术进行场景复现,能够让学生体验该标准中所提到的完整测试流程,沉浸式感受典型工作任务。
 来源:智能网联汽车运行安全测试项目和方法
来源:智能网联汽车运行安全测试项目和方法
 来源:智能网联汽车运行安全测试项目和方法
来源:智能网联汽车运行安全测试项目和方法
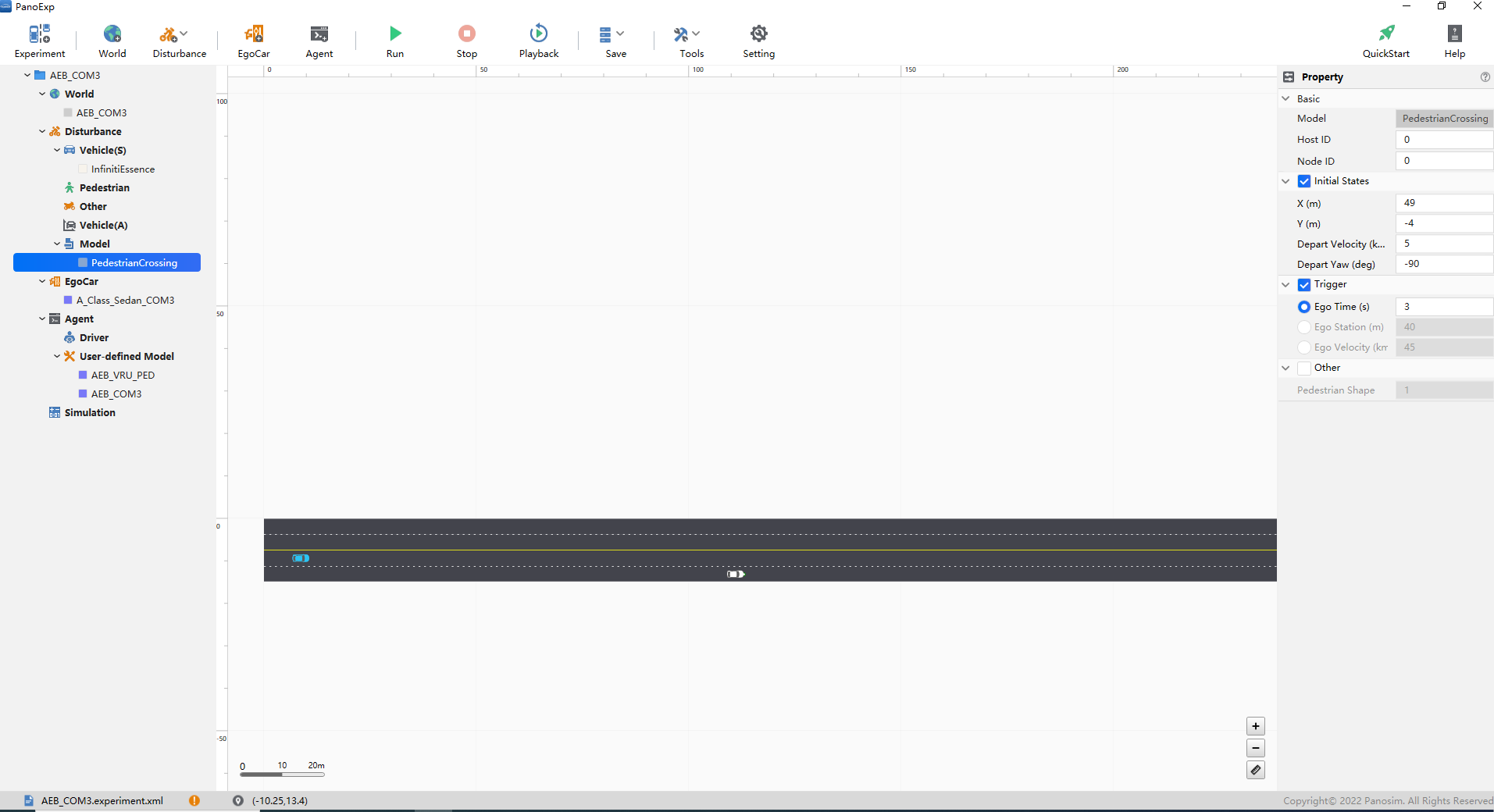 来源:在环集成无人驾驶仿真系统
来源:在环集成无人驾驶仿真系统测试组织在在环集成无人驾驶仿真系统中模拟如下:
 来源:在环集成无人驾驶仿真系统
来源:在环集成无人驾驶仿真系统
测试时间
车辆纵向速度
车辆纵向加速度
车辆驾驶模式
车辆制动踏板
制动控制器状态
车辆转向灯状态
车辆周边识别信息
每个测试子项目宜采集的相关参数不尽相同,但在实际的测试事件数据记录中,一般会详细采集各项原始数据以供后续分析。
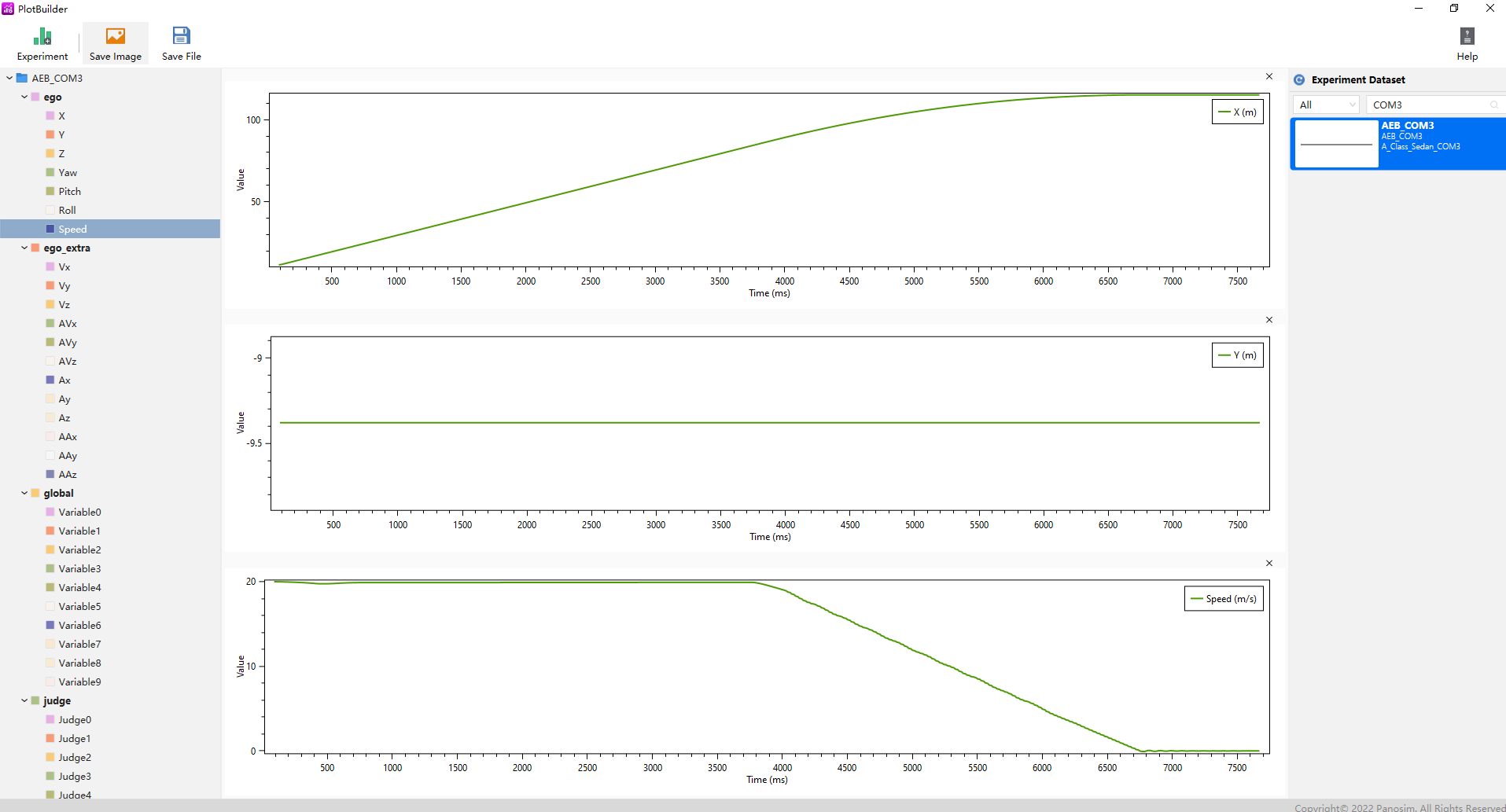
在在环集成无人驾驶仿真系统中,测试过程中所产生的各项数据均清晰保存,不仅有所需的各项参数,其他数据均可顺畅切换查看并保存,最大程度方便记录和分析。
 来源:在环集成无人驾驶仿真系统
来源:在环集成无人驾驶仿真系统
通过对在环集成无人驾驶仿真系统的各项数据进行分析,即可得出被测车辆是否通过该测试项目。
同时,由于在虚拟环境中进行测试的成本几乎可以忽视,因此可以设置大量对照组,帮助学生全方位理解被测车辆在各种环境下的不同表现。
三种测试方法有何联系与区别?三者的先后顺序如何?为什么会是这样的先后顺序?
这些都是摆在职业院校与教师面前的问题,只有明确这些问题的答案,才能够理解虚拟仿真测试课程的必要性,才能教出深刻理解并掌握测试方法、能够胜任测试岗位的学生。
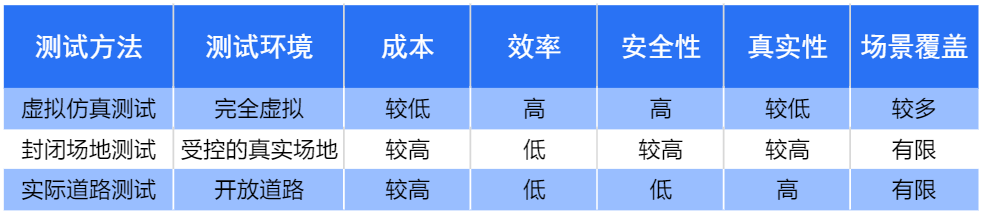
虚拟仿真测试通过发现危险场景和边缘场景支撑封闭场地测试和实际道路测试;封闭场地测试不仅对模拟仿真测试进行验证,同时支撑实际道路测试的开展;实际道路测试是在真实道路交通中发现实际道路运行中的危险场景和边缘场景。
三种测试方法相互融合、补充、验证,共同保障智能网联汽车安全性得到科学、充分的测试评估。
在实际的测试流程中,三者并不是同时进行的,首先进行的是测试场景构建及模拟仿真测试,在仿真测试通过之后,才会进入封闭场地及实际道路测试。
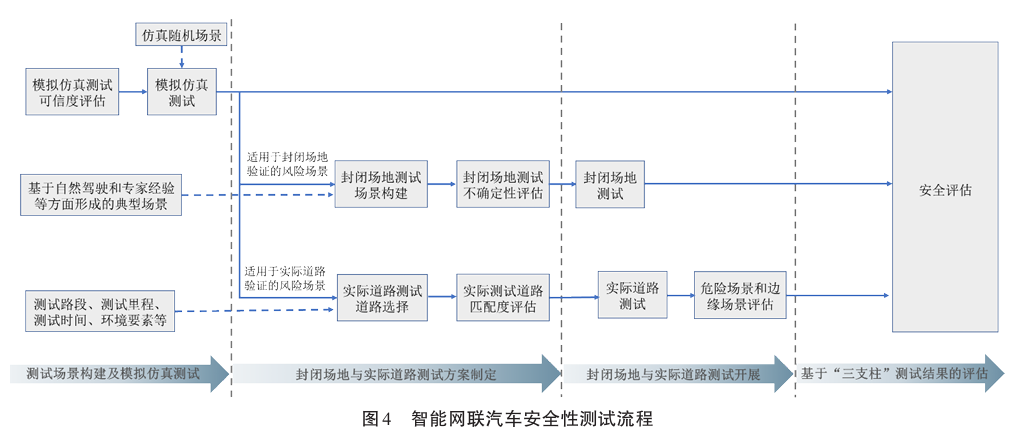 来源:基于场景的智能网联汽车“三支柱”安全测试评估方法研究.刘法旺,曹建永
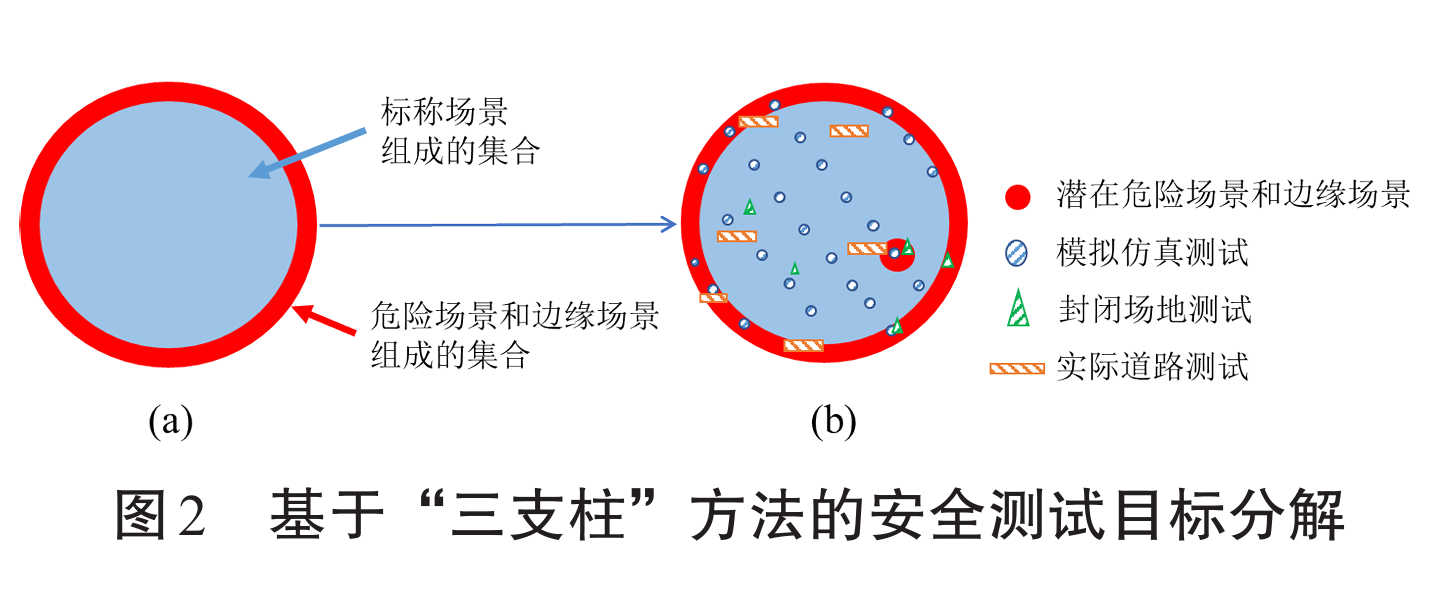
来源:基于场景的智能网联汽车“三支柱”安全测试评估方法研究.刘法旺,曹建永真实道路交通环境复杂多变,标准文件没有穷举也无法穷举全部的现实场景。在三种测试方法类型中,虚拟仿真测试是唯一一种可以通过生成合理的随机场景,来发现自动驾驶系统的潜在危险场景和边缘场景的测试方法。
这种方法不需要测试员和驾驶员涉足危险场景,能够在保证测试安全性的同时,提供成本效益高、灵活性强、可重复性好的测试环境,并且能够大规模地测试自动驾驶汽车的各种功能和性能。这些优势使得虚拟仿真测试成为智能网联汽车运行安全测试过程中的首要步骤,更是不可或缺的一环。
 来源:基于场景的智能网联汽车“三支柱”安全测试评估方法研究.刘法旺,曹建永
来源:基于场景的智能网联汽车“三支柱”安全测试评估方法研究.刘法旺,曹建永学生只掌握该标准所载的各个测试项目及方法,并不能完全胜任智能网联汽车测试员或者自动驾驶仿真测试工程师的岗位,仅仅一门《驾驶自动化系统仿真测试技术》课程,也无法培养该类型岗位的全部基础核心能力。
易飒科技在总结诸多用人单位典型岗位职责的基础上,梳理出八大核心能力。

来源:易飒科技
《驾驶自动化系统仿真测试技术》课程所培养的是后六种能力,前两种能力需要其他基础课程进行补足,才能完全掌握仿真测试相关知识。
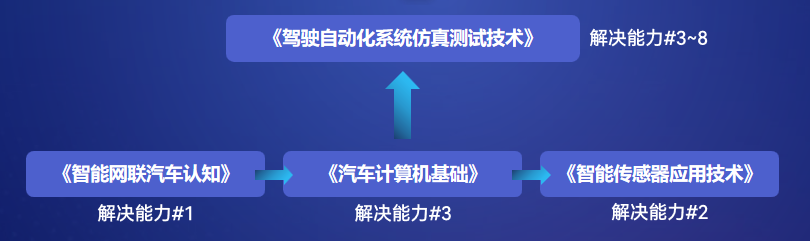
结合当前汽车产业的发展及需求,简明扼要介绍智能网联汽车涉及的各项技术,帮助学生对智能网联汽车建立整体认知。
系统全面地梳理汽车相关岗位所应具备的计算机语言基础技能,扫除学习难度高、学习周期长等障碍,帮助教师快速培养学生的编程基础和软件技能。
深入浅出地阐述智能传感器的技术体系,帮助学生掌握典型智能网联汽车传感器的工作原理、装配调试、故障诊断与检测、融合标定、应用搭建等知识技能。
随着智能网联汽车商业化应用进程提速,运行安全成为行业发展的关键相关标准体系正逐步完善,智能网联汽车测试员作为新兴职业,承担着确保车辆功能、性能、可靠性和安全性满足相关要求和标准的重要职责,对推动自动驾驶技术的发展和确保道路交通安全具有重要意义。
对于有志成为测试员的学生而言,深入了解和掌握智能网联汽车的测试技术和标准,将为未来的职业生涯打下坚实的基础;对于开设智能网联汽车相关专业的院校而言,将日渐完善的标准体系融入教学端,需要持续投入关注,才能培养出适应产业端需求的人才。
本篇仅作为学习分享,标准全文点击文末的“阅读原文”进行查看。

易飒科技是一家以科技赋能汽车产业人才的新旧动能转换、赋能智能网联人才终身成长和精准就业的高新技术企业,致力以产品力、服务力和人才力,打造智能网联产业生态的优质人才枢纽。旗下的产品与服务聚焦智能网联产业的“人才培养+人才匹配”两大体系,助力高速发展的智能网联产业解决人才瓶颈。


